- 首页
-
超维产品
- 超维智能工业巡检平台
- 轮式巡检机器人
- 轨道巡检机器人
- 防爆巡检机器人
- 复合操作机器人
- 开关柜带电操作机器人
- AIoT联合巡检平台
- 解决方案
- 客户案例
- 新闻动态
- 服务支持
- 关于我们

全国服务热线:
400-155-6825
全国服务热线:
400-155-6825

机器人(robot),产生于人类社会工业化时代,美国国家标准与技术研究院(NIST)对机器人的定义是可以编程为自动执行某些操作或移动操作的机械设备。近年来,人类社会互联网和信息技术取得蓬勃发展,人工智能、物联网、大数据等发展渐趋成熟,机器人在集成了上述技术后,使得其在工业领域外不同行业的应用普及成为可能。
数据中心机房是企业信息系统运行的核心节点,保证核心持续健康稳定对外提供服务是数据中心管理的基本目标。数据中心机房是资产密集场所,运维人员需要自动高效地掌握机房内部环境、基础设施、网络、计算和存储单元等运行状态。数据中心应用机器人技术有广泛的应用场景,经过设计的机器人融合了数据中心管理流程,作为机房内部物与物、物与人之间的媒介提升了机房运营自动化水平。本文将以H行投产的机房巡检机器人为例,详细说一说数据中心中的巡检机器人技术和机器人系统设计 。

数据中心机房巡检机器人是一个信息系统,我们以北京超维世纪科技有限公司(超维科技)所研发的智能巡检机器人为例。它由机器人本体和机器人管理系统两部分组成。机器人的运动、对外部环境的感知、数据的搜集和处理构成了机器人本体的能力集合,机器人由硬件单元、驱动程序和算法程序构成了机房巡检机器人本体的几大核心能力。

数据中心巡检机器人主要设计为完成数据中心模块间机柜内部设备和配套基础设施(空调、供配电)的巡检工作。机器人的工作环境是一个标准的机房模块,模块间一般四周放置配电或空调设备,内部机柜按照冷热通道固定距离摆放。机器人在模块间工作环境内部的运动轨迹遵守基坐标系,符合右手法则。(注:三坐标为前进方向X轴,左右方向Y轴,上下运动轨迹Z轴)
巡检机器人由母桩和巡检机器人本体构成。巡检机器人与母桩对接进行充电和固定数据传输,脱离母桩则进行无轨运动,独立完成巡检工作。巡检机器人本体不同位置部署的雷达装置与机器人的动力组件一起实现机体的室内定位、运动方向和避障动作。机器人本体部署了激光、超声波和红外线三种雷达。应用不同雷达的特性,机器人具有了对工作环境和自身位置的动态感知能力。
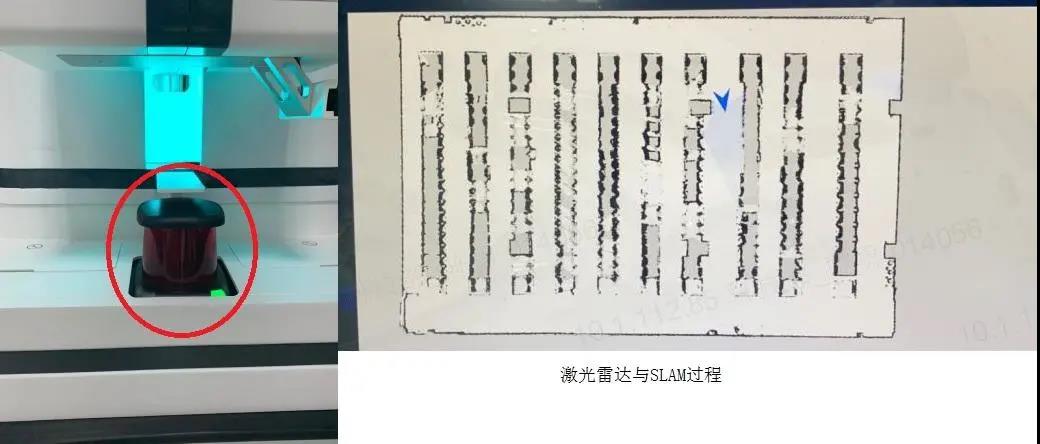
01激光雷达、SLAM技术与PFM算法
机房巡检机器人采用一部单线激光雷达。激光雷达是通过激光照射物品产生反射进行环境感知探测的,由于光速非常快,雷达通过脉冲发射固定波长的激光波和反射波的差频来计算与物体之间的时间。激光雷达的精确探测距离超过三十米,在机房巡检场景下激光雷达用于SLAM和远距离避障。SLAM(Simultaneous Localization And Mapping)即时定位和地图构建,可以让机器人在不同的机房模块间环境下迅速构建环境地图。机器人部署初期,通过遥控行进,行进过程中激光雷达通过激光发射和机械旋转扫描装置可以快速的形成一张二维的机房模块地图,机器人可以在地图的指引下自主进行路径规划和运动行进。
02超声波雷达、红外线雷达、三角测距原理和算法
机房巡检机器人在运动底座和腰线部分布置超声波雷达,超声波是声波的一种,是纵波,波形区域是扇形的区域,它主要是负责检测近扇形区域内部的物体,整体的作用距离不超3米。超声波不受周围环境影响,且整体造价低,超声波雷达可以多组部署。巡检机器人通过部署多组超声波雷达解决机器人在机房模块运行过程中机器人周围一定距离的环境感知能力,由运动单元控制机体避障。红外线雷达部署在机器人底座部位,与机房地面小于90度布置,红外雷达采用三角测距原理(即红外光束后到达物体会产生反射,红外雷达的发射端、接收端和物体反射点组成三角形,反射点至发射接收端的平面的距离就是机器人和物体之间的距离。),主要对机器人行进的地面进行高度探测,发现机房地板平面的异常,防止机器人前进过程中跌落。

超声雷达主要应用类似BUG算法和模糊逻辑实现机器人本体的避障,即机器人本体通过雷达发现障碍物后会跟踪障碍物边缘,计算障碍物边缘通过距离,试算通过后按照最短路径方式绕过障碍,应用模糊逻辑控制机体发现障碍物时运动的形态。
03机器视觉
机房巡检机器人的业务能力,是对机房模块内部的设备进行巡检,读取设备屏幕的数据,分辨设备的指示灯,对指示灯和液晶屏的数据进行识别。机器人视觉由镜头组、视频采集卡、GPU和视觉算法等构成。机房巡检机器人在机器视觉方面具有测量、检测、识别、定位的功能,机器人的光学元件由定焦快照工业摄像头、红外摄像头和大景深摄像头组成的镜头组构成,定焦头负责机器人沿Z轴运动时的快速拍照,拍照时镜头面向机柜,以U位距离(4.445厘米)为运动单位对机柜进行拍照;红外摄像头负责采集机柜热源图像;大景深镜头负责采集机器人运动过程中的动态图像。
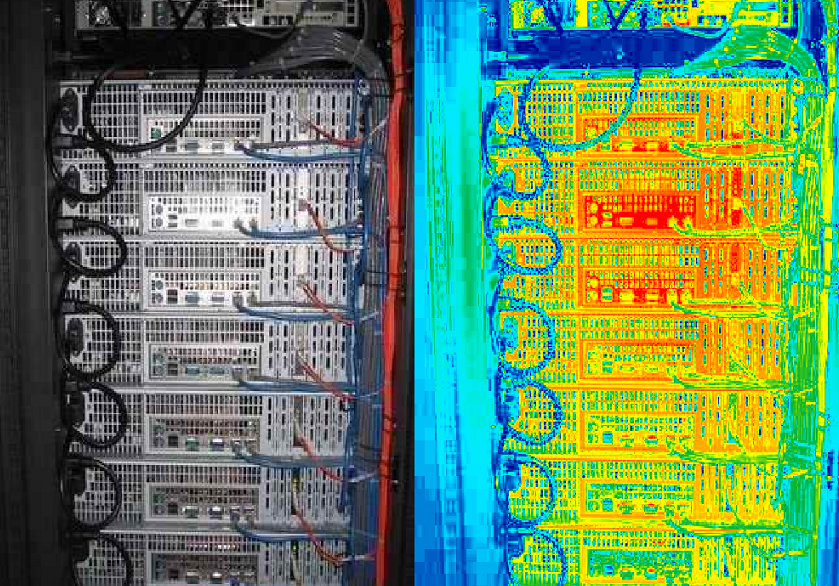
工业相机拍摄的照片由图像处理模块拼接成一张整体机柜图片,机柜内部的主机根据U位分布隔离开,原始图片识别出检测对象元素,应用机器视觉和算法训练识别出机柜内部设备前面板的指示灯颜色,应用OCR技术识别图片中的特定数据。红外相机根据机柜热源分布得到机柜的热分布图像。
04机房巡检管理系统
巡检管理系统主要功能分为两部分。首先,定制化推送机器人本体的结构化的任务数据,然后解析并存储机器人完成的任务结果。其次,与运维中心其他流程化系统对接,如配置管理系统、统一监控管理平台,数据中心综合管控平台等,用于更新机房模块内部资产数据、推送巡检报警、掌握数据中心模块间人员访问情况以及与其他AI模块(如人脸识别)交易的对接等。
巡检设备库,是对于特定巡检目标项建立的巡检标准模型,G行对于巡检项的外部巡检制订巡检标准,巡检标准由巡检类型、巡检属性和巡检属性值三层构成,巡检标准逻辑最终和机器视觉结合得到巡检库与巡检图片的对应关系,明确状态指示和故障提示,精确匹配设备报障信息。
机房巡检机器人巡检流程就是巡检管理系统根据机房区域确定巡检范围和巡检计划生成任务单,任务单通过封装接口传送至机器人,机器人收到任务单根据巡检地图和巡检路线完成巡检数据的采集,生成巡检结果表单,巡检对象的异常情况,再根据巡检设备库的对应关系明确故障现象生成报警信息。
机器人技术是工业设计、硬件应用、人工智能和计算机科学多学科交叉的集成体。数据中心机器人可以承担如机房巡检、安全巡逻等专项工作,减少或者替代人员参与,打造少人化、无人化数据中心机房,提升运维工作的自动化水平。